Em 2018 a aquisição de uma
montagem equatorial alemã iOptron CEM60 dotada de um Hub USB com fornecimento
de energia 12volts fez-me pensar em automatizar a sua operação bem como todos
os dispositivos conectados à mesma, nomeadamente as camaras CMOS/CCD de
aquisição de imagens e de guiagem, assim como o sistema de focagem e um
simulador do céu/planetário tipo SkySafari ou o Kstars.
A
montagem e o tripé (antes e depois)
Surgiram na altura duas ofertas
no mercado, com características de grande portabilidade e de crescimento
modular e ainda de baixo custo. Uma de origem koweitiana (designada por StellarMate IoT), outra de iniciativa
francesa (AstroPiBox)
tinham por base a placa Rasberry Pi 3, que entretanto ganhava popularidade e se
expandia em aplicações de toda a ordem, chegando a Estação Espacial Internacional a estar dotada
de dois RB Pi para software concebido pelas escolas.
A nossa opção centrou-se no
IoT (Internet of Things) StellarMate dado
apresentar-se com integração de meios e software (firmware) nomeadamente o
conjunto Kstars/Ekos/INDI sob
qualquer plataforma Windows/Linux/OSX/Android.
Kstars é um
simulador do céu, tipo planetário, com origem na iniciativa KDE-edu
enquanto o Ekos constitui um
ambiente de controlo integrado que permite a gestão de um conjunto de operações
desde a aquisição de imagens e de guiagem até ao controlo de qualquer
dispositivo de utilização astronómica (camaras cmos/ccd, rodas de filtros,
sistemas de focagem, montagens, desembaciadores, Flip-Flat, espetrógrafos,
óticas adaptativas, estações meteo, GPS, observatórios, astrometria de
precisão, alinhamento polar, operação robótica à distância, etc).
INDI
constitui a coluna vertebral de todo o sistema porque é um servidor que
assegura a comunicação kstars/Ekos com os “drives” de todos os periféricos em
simultâneo.
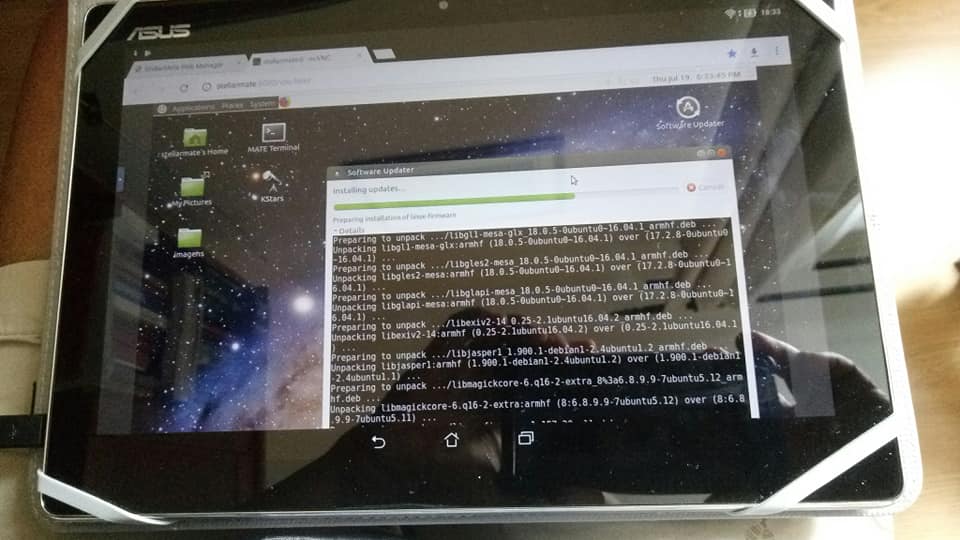
O RB Pi3 da StellarMate
inclui já um micro-cartão SD de 16GB de classe 10 com todo o software.
Acionámo-lo a partir de um Tablet Android ASUS de 10 polegadas e configurámos o
StellarMate e a iOptron CEM60 com toda a cablagem USB, redutores de voltagem e
amperagem e ainda adaptadores porta-série RJ4/DB9/USB necessários para a sua
operação eficaz.
Quisemos dotar a montagem iOptron
CEM60, possuidora
de um sistema inovador de balanceamento denominado “Center
Balanced Equatorial Mount”, com a possibilidade de alternar com a
instalação de diversas óticas como um Celestron 203mm ou uma Takahashi 102FS ou
ainda um refrator 66/400. Para tal tivemos que aplicar na montagem um suporte
que acondicionasse o StellarMate bem como outro equipamento que descreveremos
mais adiante.
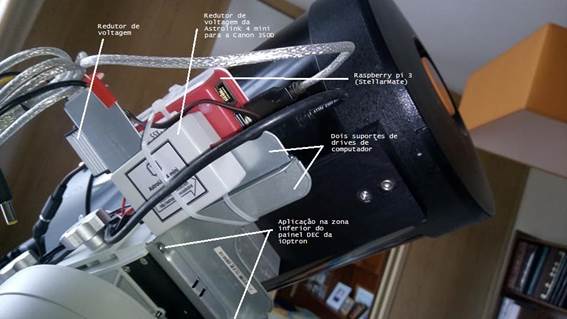
Sistema
mecânico de suporte ao Rasberry Pi3 e redutores de voltagem
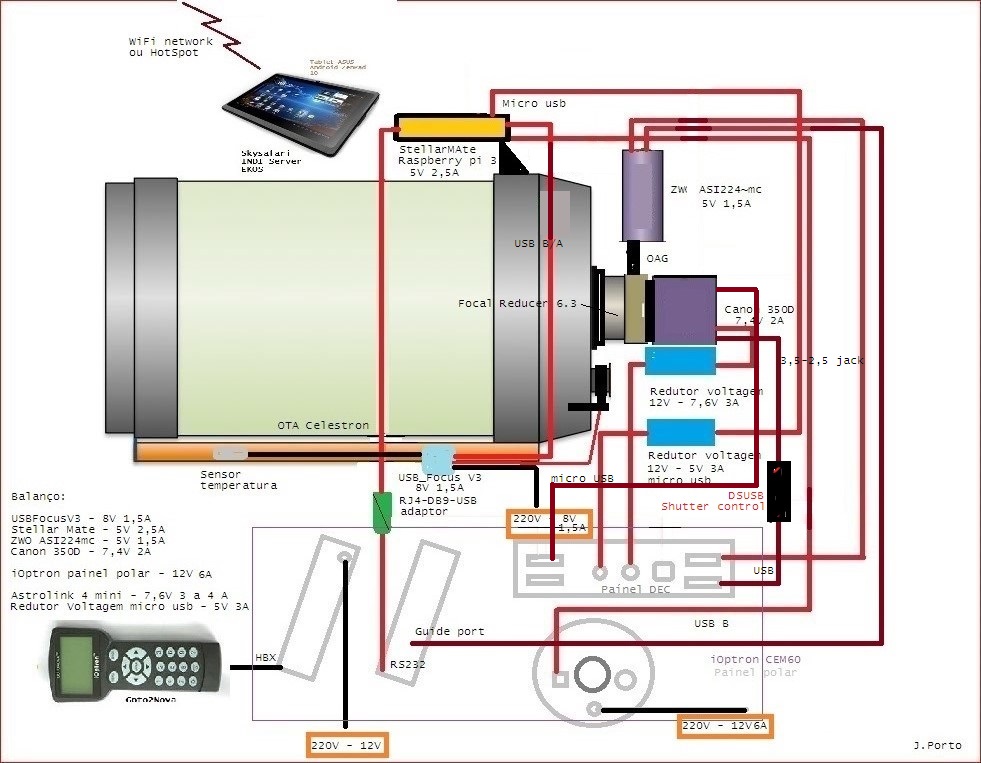
Esquema
geral definitivo do fluxo de dados e dos circuitos elétricos (com o C8 como ótica)
Como equipamento de aquisição de imagens tínhamos a velha Canon
350D desfiltrada, com sensor CMOS de resolução 3464 x 2309 píxeis e 6,41
microns de pixel pitch, e, à qual foi necessário adaptar um cabo a ligar a
bateria de lítio a um redutor de 12 volts fornecidos pelo painel DEC da
montagem iOptron convertendo-os para 7,6 volts e 2 amperes através de duas
fichas macho/fêmea de 5,5/2,1. Usando solda e ferro de soldar e depois de
identificadas a polaridade dos fios foi fácil conceber esta ligação. Tivemos a
preocupação de arranjarmos um redutor de voltagem que se situasse entre os 7 e
8 volts e fornecesse os 2 amperes para não “fritar” a bateria da Canon.
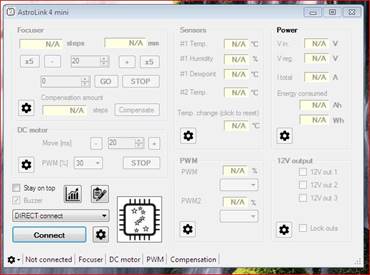
A Astrolink
4 Mini possuía um redutor deste género devidamente protegido e
destinado a camaras DSLR.
A Canon
350D agregada a um OAG juntamente com a ZWO ASI224mc como camara de guiagem
Da Canon 350D fizemos uma ligação ao DSUSB da Shoestring com a Canon em Bulb e M Mode (cabo coaxial com jacks machos respetivamente de 3,5mm/2.5mm tipo E3), ligando depois diretamente o gadget DSUSB através do seu próprio cabo USB 2.0 ao painel DEC da iOptron.
Para tranferência de imagens ainda tivemos que ligar a micro USB da Canon a outra porta USB do Painel DEC da iOptron (ver esquema).
Na plataforma INDI introduzimos a definição DSUSB na porta de comunicação.
Esquema de suporte da DSUSB à Canon 350D
Experimentámos o QuickRemote desenhado por Christian Buil sem sucesso, enquanto o interface usb-eos para exposições longas (acima de 30 segundos) comercializado pela PierreAstro funcionava perfeitamente com a adição de mais um cabo USB entre a Canon e o DEC da iOptron para transmissão das imagens.
No painel polar da iOptron CEM60 fazíamos sair um cabo USB B/ USB A ligando
ao StellarMate fazendo assim a comunicação de dados entre os dois. Ainda ao painel
polar fornecíamos energia 12 volts 6 amperes com um transformador.
A camara de guiagem ZWO ASI224mc montada num OAG
(Off-Axis-Guider) ligava diretamente a sua porta ST4 à porta “Guide” na própria
montagem, enquanto o cabo USB B da ASI ligava a uma porta USB do painel DEC da
iOptron CEM60.
No StellarMate ligavam diretamente os cabos USB A do motor de focagem,
USB_Focus_V3, e da própria montagem iOptron com cabos adaptadores RS232/RJ4/DB9/USB
A, dado que tanto a montagem como o focador tinham fornecimento de energia
independentes não sobrecarregando o StellarMate. Ao StellarMate era fornecida
energia 5V 2,5 amperes a partir dos 12 volts do painel DEC da iOptron através
de um redutor de voltagem e com cabo micro-USB.
Aspeto
das ligações ao StellarMate e ligação RJ4/DB9/USB da montagem iOptron
Aspeto do painel DEC da
iOptron com saídas para a Canon, ZWO, voltagens para Canon e StellarMate
Ao sistema de focagem USB_Focus_V3 adaptámos um conjunto de
placas metálicas adquiridas na AKI e que, com alguns parafusos e anilhas de
aperto, dispúnhamo-lo de forma apropriada a permitir ao motor poder fazer a
focagem sem stress mecânico.
Sistema
de focagem instalado permanentemente no DEC da ioptron permitindo alternar com diferentes
óticas.
Em termos de potência elétrica
instalada, tivemos o cuidado de ter um conjunto devidamente balanceado de modo
a que tanto o fluxo de dados como as amperagens estivessem distribuídas devidamente
e não causassem obstáculos operacionais:
iOptron
paínel polar – 12V 5Amp / Transformador – 12V 6Amp
USB_Focus_V3
– 8V 1,5Amp com o seu transformador próprio
StellarMate
– 5V 2,5Amp / Redutor Voltagem – 5V 3Amp
Canon
350D – 7 a 8V 2Amp / Astrolink 4 Mini – 7,6V 3 a 4Amp
ZWO
ASI224mc – 5V 1,5Amp
Reguladores
de voltagem para a Canon350D e para o StellarMate
Tranformadores
para o painel polar da iOptron e montagem iOptron CEM60 e ainda para o sistema
de focagem USB_Focus_V3
Resolução de problemas
adicionais de facilitação operacional do sistema:
Adaptação de uma pesada
“dolly” de modo a encurtá-la para poder andar nos corredores de acesso ao
exterior e balanceamento do contra-peso dado que com a instalação das camaras,
do sistema de focagem e de um TelRad o eixo AR ficava ligeiramente
desequilibrado a oeste. Inventámos um contra-peso adicional instalado no
próprio contrapeso da montagem iOptron aproveitando uma rosca existente.
Criámos também um dispositivo
para produção de Flats convertendo um monitor de computador e ainda instalámos
uma camara robótica para monitorização da operação da montagem bem como um
monitor de voltagem.
Adaptação
da “dolly”
Contra-peso
adicional
Dispositivo
para Flats
Camara
robótica WiFi e imagem produzida pela mesma
Monitor
de voltagem do StellarMate
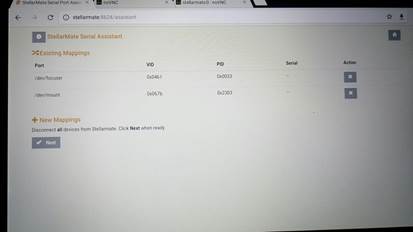
Kstars/Ekos/INDI
– a coluna vertebral
INDI Web Manager mostrando a
atribuição definitiva de portas-série de comunicação RS232 para a montagem
iOptron CEM60 e para o USB_Focus_V3 (este ultimo foi retirado depois porque não era preciso)
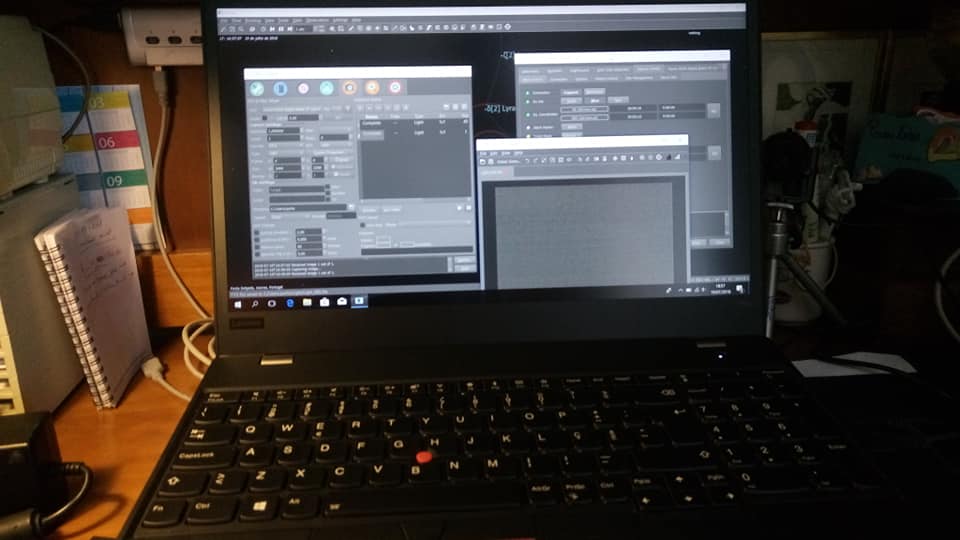
Alguns parâmetros de controlo Ekos da
montagem
Autoguiagem com o Ekos com alinhamento
polar e correção apenas a duas estrelas
A aquisição de imagens com a Canon
350D (Nebulosa do Haltere)
SkySafari controlando a montagem e
mostrando o FOV do sensor cmos
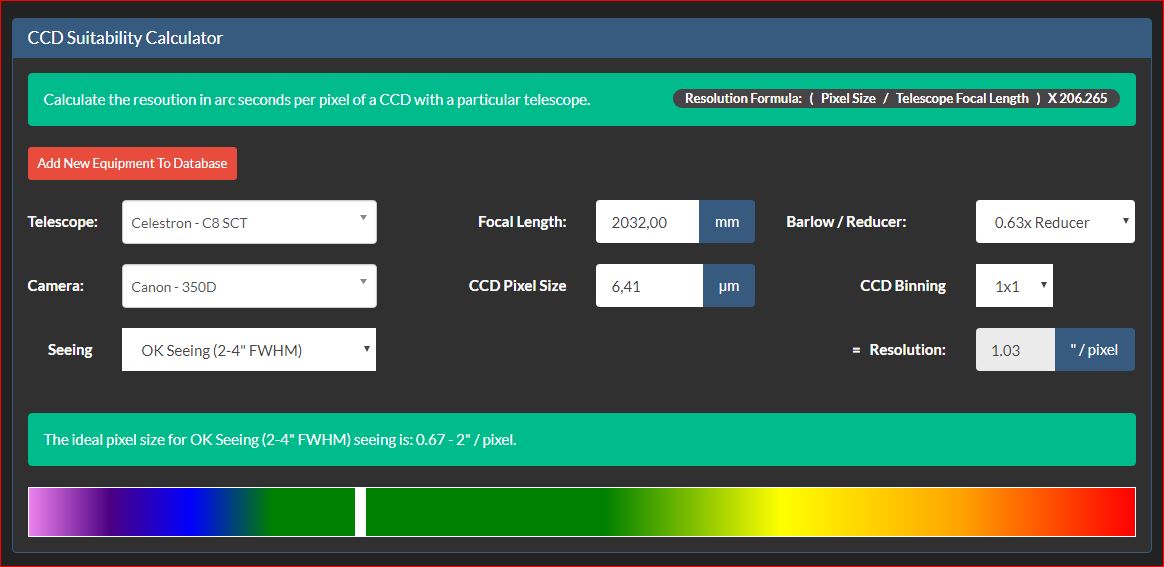
As
configurações óticas C8 f/6.3 e doTakahashi 102FS f/8
As resoluções obtidas em segundos
de arco por pixel para as duas óticas com OAG.
Os sensores CMOS da Canon 350D e
da ZWO ASI224mc permitem obter valores rácio idênticos de 1:0,59
Os dois sistemas em funcionamento na
mesma montagem equatorial alemã
Indi
Library possui um Forum de apoio aos utentes e atualizações
frequentes abarcando cada vez mais dispositivos a controlar. Jasem Mutlaq é o
seu mentor e obreiro principal.
Outras
expansões possíveis
A instalação de um outro IoT,
denominado AstroLink 4.0 Mini permite ainda adicionar outros dispositivos como
cintas desembaciadoras ou mesmo abdicar do transformador do focador
USB_Focus_V3 abastecendo-o dos 8 volts necessários ao seu funcionamento através
de uma saída de voltagem regulável.
O software do AstroLink 4.0
Mini permite parametrizar e gerir as saídas de voltagem tornando-as permanentes
bem como ainda controlar motores de passo.
Como utilizador INDI
(@fonsecaporto) quero deixar aqui um agradecimento caloroso ao sempre
disponível Jasem Mutlaq, gestor da INDI Library, lançador do IoT StellarMate e
astrónomo amador conhecedor das dificuldades práticas com as quais se defrontam
diariamente todos os astrónomos amadores. Devo-lhe o seu esclarecimento
pertinente a situações mais obscuras de algumas configurações. Também a ele se
deve o seu empenho na atualização permanente e constante de todo o firmware
Imagem
do twitter do Jasem Mutlaq com fotos do sistema
Nebulosa
do anel: integração 11x300s, C8 f/6,3, Canon 350D 1600iso
Messier 27 a nebulosa do Haltere. Exposição de 30 minutos com guiagem feita com ASI224mc e ZWO off-axis-guide. Imagens adquiridas por Canon 350D com montagem equatorial iOptron CEM60 e Plataforma Ekos/INDI. Refrator Takahashi 102fs a f/8. Controlo WiFi com Skysafari.
Condições meteo razoaveis com muita poluição luminosa de uma arraial do Espírito Santo local